おおさか東線の駅のホームに「つらら」が
新幹線で新大阪に着いて、JRでそこから奈良に帰ろうとすると、2つのルートがある。
1つは、大阪駅まで行ってそこから大和路快速に乗る、環状線と関西本線(大和路線)を通って奈良に着く。もう1つは、おおさか東線で関西本線の久宝寺まで行って、そこで乗り換えで奈良に行く方法である。
先日、初めておおさか東線に乗ってみた。列車の右側の席に座っていたのだが、駅に止まった時、向かい側のホームを見ると、「つらら」が下がっているのに気づいた。次の駅も、また次の駅にも・・・。島式のホームの駅では見えないが、ほとんどが対向式ホームだったように思う。
ホームの作る時にコンクリートが垂れて「つらら」状になって固まったのだろう。ちょっと珍しいのではないか。
まあ、写真でも撮っておこうと思った時には、この線の終点の久宝寺もすぐで、慌てて撮ったので何駅か正確には覚えていない。


部屋全体をカメラにする
大分の美術展で見たのは、20年くらい前だっただろうか。真っ暗な部屋に入ると、大分駅構内の景色が逆さまに壁に写っている。部屋全体がカメラの暗箱になってその中にいるということだ(カメラ・オブスキュラという言葉が、もともと「暗い部屋」いう意味らしい)。列車や機関車が行き来してとても面白い。
それはともかく、同じことを自分のうちでやってみたいと思っていた。でも、ピンホールカメラのように、ただの穴ではダメだろうし、適当なレンズを見つけないとというところで、ずっと、そのままになっていた。
先日思い立って、焦点距離が窓から壁くらいの長さ、つまり3mから4mの焦点距離の凸レンズを探してみた。なかなか見つからなくて、あるネットの記事を見たら、カメラのレンズにつけるクローズアップレンズのNo,1は焦点距離が1mだと書いてあった。番号の逆数が焦点距離、つまり番号はディオプトリーらしい。それなら持っている。
そこで、ちょっと試してみた。その時はちょっと勘違いして、焦点距離の2倍のところに像ができるのかと思っていたが、間違いだった。ピントが合うのは、対象物の距離によるが、焦点距離+αの距離に像ができる(無限遠の物体が焦点距離のところに像ができる)。
そういう次第で窓と像を写す壁の距離に近い(ちょっと短いくらい)の焦点距離の凸レンズを探すことになった。いろいろ探していて、やっと見つけた。焦点距離3000mm、4000mmも見つかった。色収差はあってもむしろいいくらいなので、コートなし口径30mmで、3000円ちょっとだった(レーザー実験用らしい。だから色収差の補正は必要ない)。
段ボールに穴を開けレンズをはめて、窓に貼り付けるその周りをカーテンで遮光して、向かい側には白い壁がないので、プロジェクター用のスクリーンを置いた。
空と木の枝が見える。像は逆さまなので、下の方に空がある。その上は道の向かいの家や庭の草木があるのだが、暗くてあまりよく見えない(実際はもっとコントラストが低い。スマホのカメラは勝手に調節してくれるから。左右に黒ものがみえるのは、部屋の中の邪魔者の影である。本番は、もっと適当な部屋を探す予定)。
でも、20年越しの計画が実行できて良かった。カーテンの隙間や、戸の隙間から漏れ入る光を遮ったらもう少しはっきり見えるようになるかもしれない。口径の大きいレンズに変えるのもいい。口径50mmのものもあるようなので、今度はそれを試してみよう。コートなしなら5000円ちょっとのようだ。
もうひとつ気がついたのは、北側の部屋でするといいことだ。南側だと逆光になって、影の部分が多くなってしまうからだ。でも、うちの北側には適当な部屋がないから、困ってしまう。


暗い部屋(カメラ・オブスキュラ)の実験 2022年12月18日
長い黄色い虫が
うちの裏の遊歩道に、変な虫がいた。ニョロニョロと長い黄色の虫だ。ゆっくりと動いている。長さがわかるようにと思って、そこにあった手ぼうきを一緒に撮った。後でほうきの長さを測って、虫は約40cmとなった。
頭の先は、半円形になっている。ちょっと気持ち悪い。こんな虫は初めて見る。でもスマートフォンで検索したら、すぐに「コウガイビル」とわかった。
「コウガイ」とは、虫の頭の半円形の形を(私は知らないけれど)髪結びの道具の笄(こうがい)に見立てたらしい。また「ヒル」という名前だが、ヒルの仲間ではなく扁形動物のプラナリア(うずむし)の仲間とのことである。
検索してすぐに分かるくらいだから、そんなに珍しい虫ではないようだ。湿ったところにいるらしいが、ちょうど雨上がりだったから出てきたのだろう。また、肉食でミミズなどを食べると書いてあったが、最初の写真には死んだミミズも写っている。この虫が食べたのだろうか。




自動運転をはじめる(4) 列車を追いかける
手動運転と自動運転とを混ぜるということを試みた。具体的な課題は、手動である機関車を走らせる。その後を別の機関車が自動で追いかけるというものだ。前を行く機関車をゆっくり走らせれば、ゆっくり付いてくるし、速く走れば、間が開かないように速く走る。もし、前を行く機関車が止まれば、衝突しないように後ろの機関車は止まる。
カトーのユニトラックを使う。とりあえず場所がないので、いつも設置してある線路の上にエンドレスを敷いた。フォトセンサーをつけた短い線路7つを挟んで、線路をつないだ。エンドレスは1から7までの7つの区間に分けた。
機関車の初めの位置は、1番に凸EL、2番にDLとした。DLの方を手動で動かし、後ろのELの方を自動で運転する。すぐ前の番号にDLがいるときは止まっていて、次の次の番号まで前のDLが進むと、後ろのELが走り始める、というプログラムだ。差が開くと加速して、差が縮まれば速度を落とす。差が1つになれば止まる。
最初はバグがあって、急に速度が速くなりぶつかりそうになったが、意外とすぐに修正できた。
DLを運転すると、後ろをELがついてくる。まずは単純な動作だけれど、人が運転する機関車の位置を検知して、別の機関車を自動で運転することができた。




次は、列車の行き違いなどを試してみたい。でもポイントを持っていないので、ユニトラックのポイントを買ってDCC化しなくてはいけない。
2022年11月7日
自動運転をはじめる(3) 自動と手動
ちょっと、気になることがあった。自動運転は確かに素晴らしい。でも、自動で何もかも済むのなら、自分が楽しむ余地はない。自動運転の列車があって、自分が運転する列車もある、それが一番楽しめる形ではないか。
簡単に実現できるものは、自分が運転している経路を自動で(ある程度の距離をとって)ついてくる、そういうことができるといい。
と考えて、ちょっとわからなくなった。プログラムが走っていて自動運転中に、人が別の(またはその)列車を制御することができるのだろうか?
多分できるのではないか。いや、パソコンで何かプログラムが走っていて何かをしている時に、そのパソコンで何かその対象に指示をすることは普通できないのではないか。などと、否定的な疑問もでてくる。
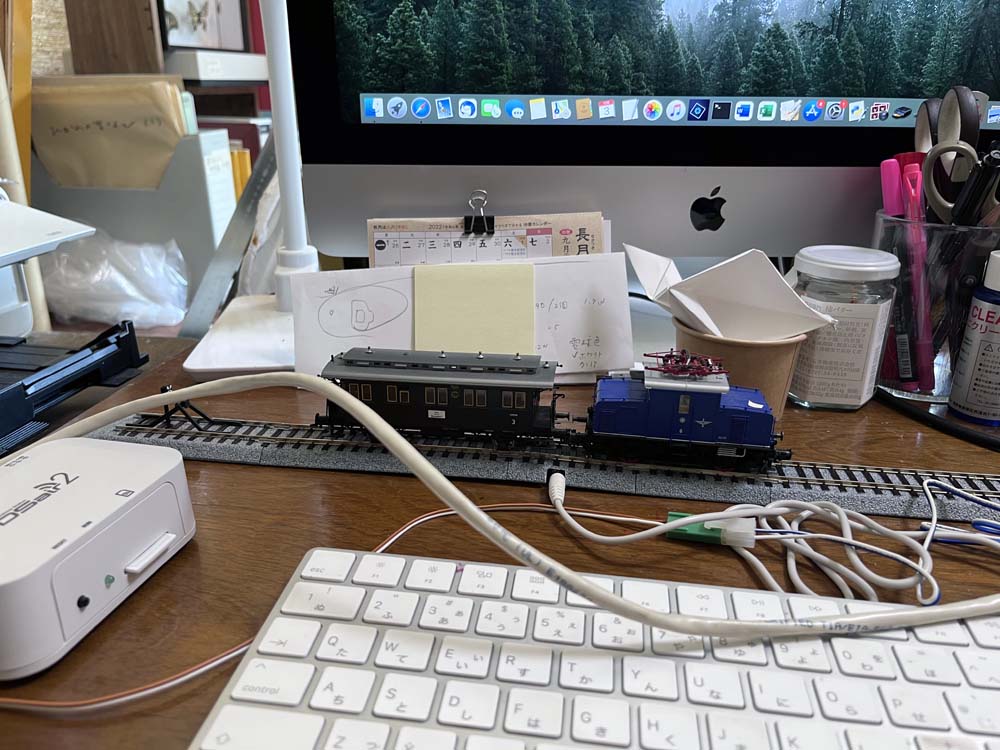
そこで、今日はその点を確認した。2ー3日前に作ったDSair2の単線を往復する自動運転のシステムを使う。それをパソコンで走らせる。同時にスマホからDSair2につないで、別の車両に指示を送ってみた。
机の上で場所がないので、別の線路1本にディーゼル機関車を乗せただけである。そのライトを点灯する信号を送ると、ちゃんと点灯した。
DCCのシステムは、列車に信号を送るとその指示に従い、その後はそのままの状態を維持するのだから、つまり時々間欠的に信号が送られるだけなのだから、プログラムが走っていても、手動で指示ができるのも当然なのかもしれない。
これで、自動運転と手動運転を組み合わせて遊ぶことができると確認できた。あとは何をするか工夫次第だ。


自動運転と手動運転 2022年11月5日
自動運転をはじめる(2) 光センサーの製作
前回は、以前購入してあったプリント基板を使って光センサーを線路に取り付けたものを2個作った。それで一応、往復の自動運転のテストは成功した。
ちょっと不都合があって、カトーのHOの線路(ユニトラック)に付けると厚みが多すぎて、線路が少し高くなってしまうのである。3.5mmのジャックを挿せるように作るとすれば、むしろプリント基板なしの方がいい。
光センサーは多数いるだろうから、これから作るものは、プリント基板を使わずに作ろうと思った。線路にフォトリフレクターを付け線路横に差し込んだジャックと、細いコードでつないだ。配線は前回検討した通りなので間違いはない。
と思ったら、うまく働かない。つないだだけでセンサーが働いた状態になってしまう。ネットで調べたのだが、なかなか原因がわからなかった。
しばらくして気づいたのだが、原因は(3mm角くらいの小さいものなので)フォトレフレクターを表裏逆に付けていたことだった。こういうこともあるのだ。配線を切って、付け直したら正常に働くようになった。高さもちょうどいい。これで明日から量産できそうだ。量産といってもとりあえず全部で8個かな。


光センサーの製作 2022年11月4日
DSair2で自動運転をはじめる(1)
DCCを導入した時から、自動運転はやってみたいと思っていた。2年ぐらい前にDSair2を買ったのは、自動運転を簡単に手軽にできると思ったからだ。
DSair2は時々使っていたのだが、同じ時期に購入してあったs88ディテクターとセンサーはそのままになっていた。組み立てキットで少しハンダ付をしなければいけないものだ。その時、少し組み立て始めたのだが、なぜか熱が冷めて放ってあった。でも昨日急にまた熱意が戻ってきた。
しかし、2年前のものだから、ネットをみてもキットが正確にどれに当たるのかわからないところもある。普通の会社の製品ではなく、頒布会みたいなものだから、質問もご遠慮くださいとある。


まず、s88ディテクターは、ボードに乗っているアルディーノ・ナノにプログラム(スケッチ)を入れなければいけない。そのプログラムがどこにあるかを探すのにも手間取った。今、思うと理由が特になかったようなのだけれど、書き込みにも失敗した。
その上、組み立て途中だったので、アルディーノ など一部の部品はプリント基板に刺してはあるがハンダ付していなかった。ひょっとして、刺すだけでもいい可能性もあるかな思って、テスターで調べてみたがダメなのがわかった(当たり前である)。
S88-Nディテクターの次は、センサーである。センサーは25×25mmの小さなプリント基板にミニジャックとフォトリフレクタを取り付けて線路に設置するものだ。センサーは電流式ではなく、光式である。
これも取り付ける向きなどが不明である。フォトリフレクタの品名がわかっているので、ネットで配線図を見ることができる。小さなフォトリフレクタの四角形の一隅が欠けていてそれが目印になっているのも気づいた。しかし、小さなプリント基板を見ると、リフレクタ部品の穴から2本の線が見えるだけである。リフレクタの足は4本なのに。
ここでもまた思いついたことがあった。プリント基板は線の部分があって、それ以外の広い範囲はアースの部分なのだろうと(当たり前のことだろうが、私は今まで考えたこともなかった)。テスターで当たってみると、そのようである。それなら配線図との対応ができる。
1個だけプリント基板上にジャックとリフレクタを組み立てた。そこで、DSair2、ディテクター、リフレクタをつないでテストをした。
しかし、テストをしようにもどうやって動作を確認していいかわからない。ネットで見ると、センサーが働いているかどうかを見る画面があるのに、ここでは見つからない。しばらくしてわかったのは、ブラウザ上のアプリではなく、パソコン上のアプリだとセンサーの働きを見るページがあることだった。
「DesktopStation」の謳い文句は、パソコンさえあれば何でも安価に気軽にできるということだった。しかし、私はそのパソコンを持っていないことに気づいた。ウィンドウズにしか対応せず、Macはダメとのことだからである(仕事をしていた頃は仕方なく1台くらいはウィンドウズマシンもあったのだが)。
しかし、そのアプリほどではないが一応センサーが働いているかどうか、ウェブ上のアプリでも見ることができることを見つけた(Education Platformの右上)。
そこまで来て、「きっと上手く働かないのではないか。働かないとなると原因を見つけるのは難しいだろう」という弱気でテストに臨んだ。
しかし、予想に反して、手で影を作ると赤の信号が緑に変わって、機能していることがわかった。成功である。そこでカトーの短いレールにジャックとセンサーを取り付けたものを2組作った。昨日は1日でかなり進むことができた。


今日は、机の上に線路を置いて、自動で往復運転を試す。プログラミングはウェブ上のアプリなので、スクラッチ風のものである。例があったのでそれを参考に(ほとんどそのまま、待ち時間を変えたくらい)、書いた。
ゆっくりだが小型ELが走った。センサーで感じてから止まるまで少し進むので、折り返すときに、センサーがまた感じることをどう回避するかなど、待ち時間の設定がむずかしい。
スクラッチ風のプログラミングでは、変数も使いづらいし、書くのに時間がかかる。どうしようか。
とにかく、多くの困難を乗り越えてなんとか自動運転ができるようになって大変喜ばしい。

DSair2(デスクトップステーション)による自動運転(HO) 2022年11月3日