最近、自動運転を試してみた。うちのDCCシステムは、RocoのZ21である。それに合うものということで、Rocoの検出器(Z21 Detector X16)を買った。
この辺では売っていないので、ドイツの店にネットで注文した。この頃は、ブラウザの翻訳機能も優れているので、一応安心して買える。マニュアルもドイツ語だけでなく英語もあるので、まあ何とかなる。1週間で手に入ったのには驚いた。日本の店で買うのと変わりはない。送料がちょっと高いけれど。
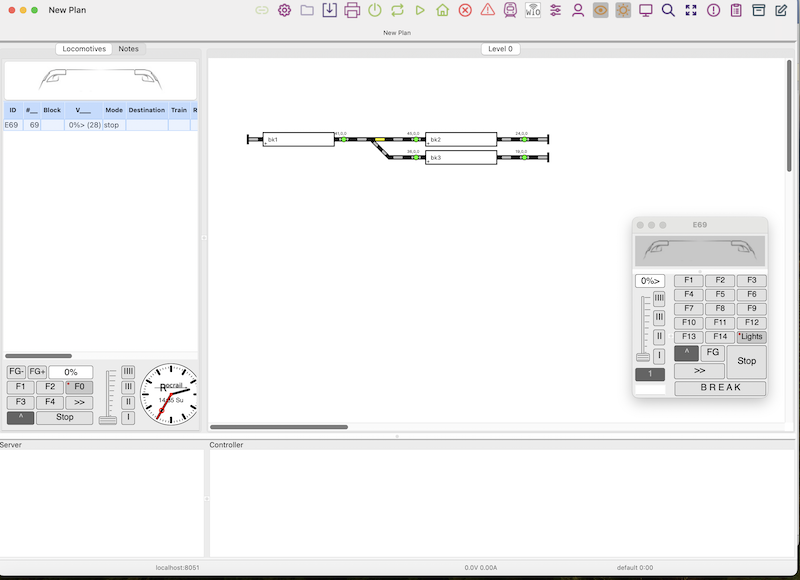
ソフトはRocrail(フリーのソフト)がいいとネットで見たのでそれを使う。Mac用のものをダウンロードして設定した。
そのときわかったのだが、Rocrailの情報が少ないことだ。なぜだろう。今時、どんな些細なことでもネットで分からないことはないと思っていたけれど(もちろん、意見の分かれる事柄とかは難しいけれど)。
日本語の情報は主に2つ、「風のおひるね」と「Spur Z Room」だ。前者に、ダウンロードとコマンドステーションとの接続の解説があって役立った。Rocrailのページにはわかりやすい解説があるが(それもダウンロードしてからのことだから)。
線路は、今までのレイアウトを壊して、単純な配置で実験することにした。線路はフライッシュマンのもの。(今はなくなった)HOです。*
列車を検出するには絶縁ジョイナーが必要だが、今はフライッシュマンのものが買えないのでRocoのものを買ってみた。ほぼ同じで使えるようだ。
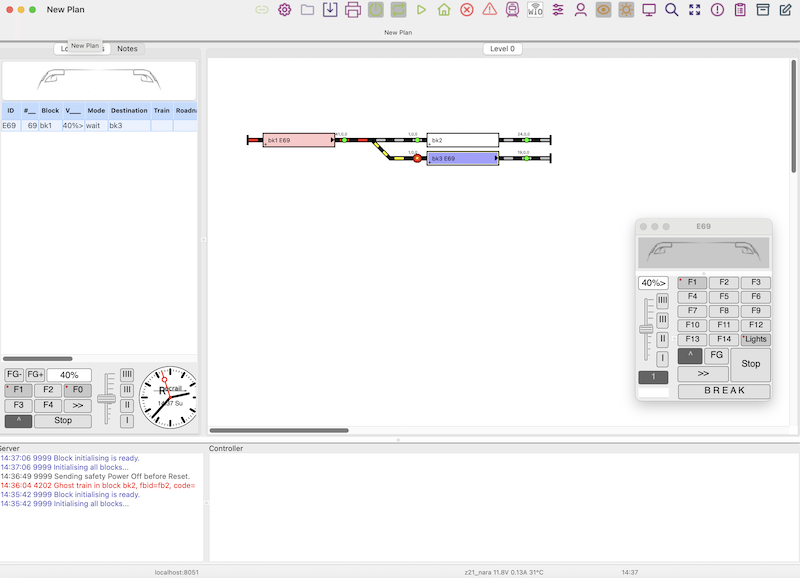
いろいろ分からないことがあったが、なんとか解決して今日やっと自動運転がうまく行った。



日本語の情報が少ないので、イギリスの(OO)ページを探し、「Rocrail My step by step tutorial #1から・・」を参考にした。はじめは英語のYouTubeは見ても分からないと思っていたが、翻訳して日本語字幕を表示させて見るとある程度分かる。
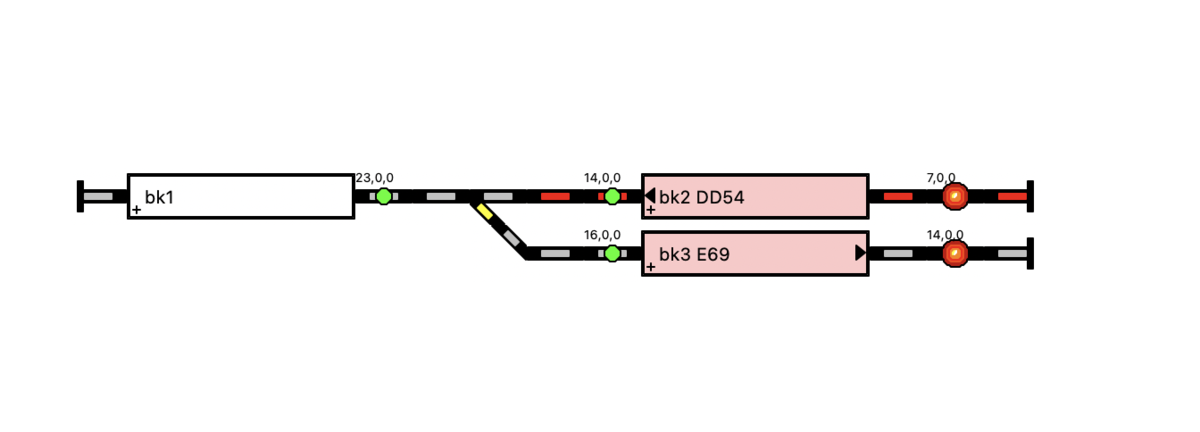
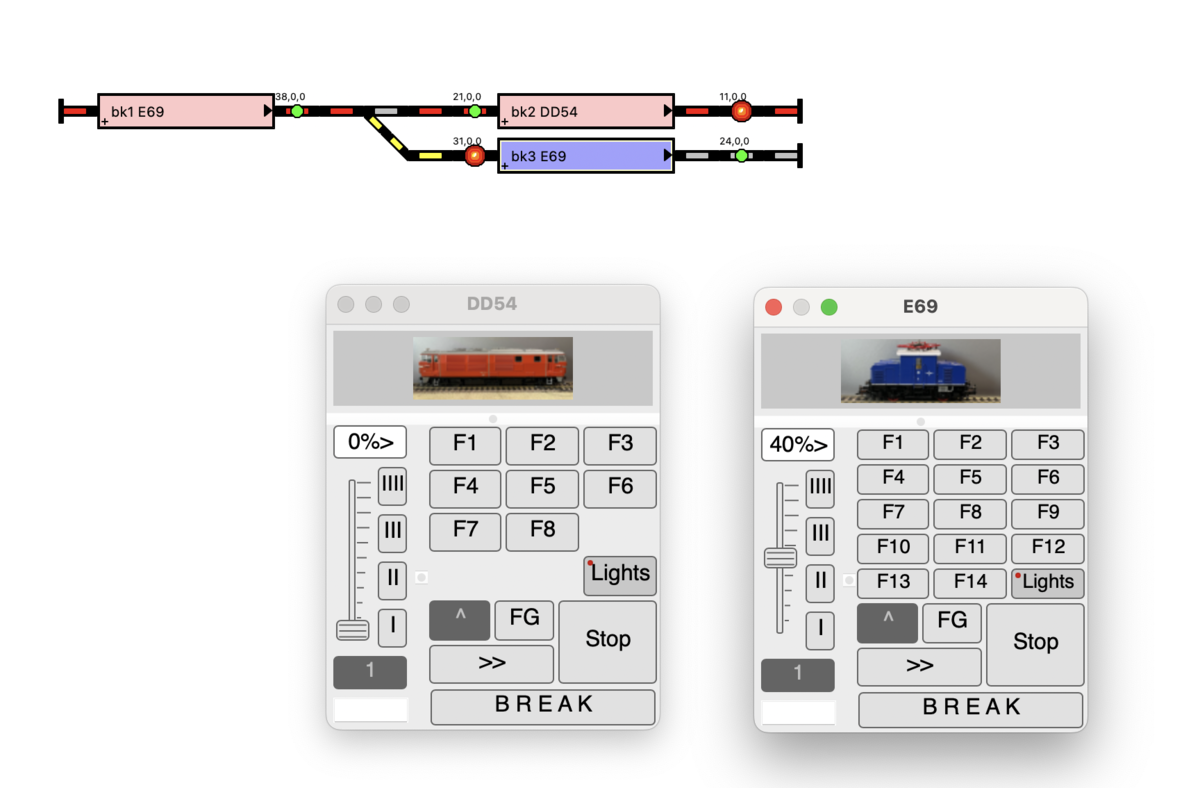
その例に倣って、ポイント1つの簡単な線路配置にした。3つのブロックと、5つのセンサーがある。
お任せモードの自動運転にセットすると、1両の小さな凸電が、行ったり来たりする。ポイントでどちらに行くかはランダムに決めて、ポイントもRocrailが自動的に切り替える。
まだ使い方がはっきり理解できたわけではないが、私が苦労してところ、疑問に思ったところ、そして解決したことを次回から書いていこうと思う。上で言ったように日本語の情報が少ないので初心者に役立つと思って。
阿蘇ひぐらし鉄道 2026年7月19日
*数年前、フライッシュマンとRocoは一緒になって、前者はHOをやめN専門に、後者はHO専門になった。